
利基Servo Commander 8模块是专为机器人入门使用者所设计,除了拥有最低价格之外,其结合了简易的BASIC Commander - BC1架构与一个Servo Runner 8,使用者能大幅缩小模块所需要面积,减少连接线材,并保留完整的Servo Runner 8功能: 可以一次控制八个伺服机,运用整合好的指令,让用户可以直接设定以固定速度或共同时间,决定伺服机的移动方式。设有多达60组内存可以储存伺服机目标位置与移动方式(速度或时间),让各种动作轻易组合完成。
应用方向:
1. 各种伺服机的操作与应用,包括机械手臂,机器人关节。
2. 小型化的各式伺服机设计相关应用。
应用方向:
1. 各种伺服机的操作与应用,包括机械手臂,机器人关节。
2. 小型化的各式伺服机设计相关应用。
产品特色:
1. 保留BC1的功能与Servo Runner 8的八组操控硬件接口。
2. BC1与Servo Runner 8连接之cmdBUS内建,无须额外连接。
3. 伺服机与电子组件共享电源,可以用单一电源提供伺服机与电路动作。
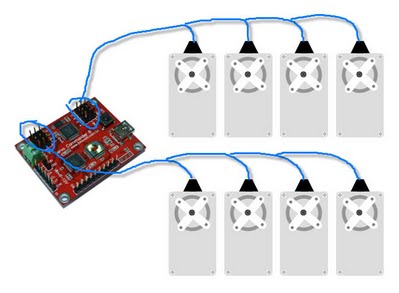
4. 八组伺服机输出接口,可同时控制八组伺服机。
5. 可控制伺服机位置由0.5 ms至2.5 ms。
6. 软件微调指令,不用机械拆装,仅由软件设定,就可以达到微调各个伺服机转向角
1. 保留BC1的功能与Servo Runner 8的八组操控硬件接口。
2. BC1与Servo Runner 8连接之cmdBUS内建,无须额外连接。
3. 伺服机与电子组件共享电源,可以用单一电源提供伺服机与电路动作。
4. 八组伺服机输出接口,可同时控制八组伺服机。
5. 可控制伺服机位置由0.5 ms至2.5 ms。
6. 软件微调指令,不用机械拆装,仅由软件设定,就可以达到微调各个伺服机转向角
度的目的,可设定-128~127 μS。
7. 程序可以设定伺服机转向速度,用户可根据需求设定多段的伺服机转向速度。
8. 使用者可以设定一个共同时间,让各个伺服机在同时间达到不同的转向角度。
9. 内建60组伺服机记忆空间,每组可以储存目前设定好的八个伺服机目标位置,与速
7. 程序可以设定伺服机转向速度,用户可根据需求设定多段的伺服机转向速度。
8. 使用者可以设定一个共同时间,让各个伺服机在同时间达到不同的转向角度。
9. 内建60组伺服机记忆空间,每组可以储存目前设定好的八个伺服机目标位置,与速
度或时间参数,在需要时直接呼叫,可以免去重复设定的动作,也可以快速组合出
多样化的效果。
10. 设有四组事件提醒,让使用者可以在判断动作完成后,自动进行下一项操作。各事
10. 设有四组事件提醒,让使用者可以在判断动作完成后,自动进行下一项操作。各事
件可以设定任意1~8个伺服机作为判断依据。
11. 各种状态取得指令,用户可以随时确认伺服机是否动作完成,取得现在位置,目
11. 各种状态取得指令,用户可以随时确认伺服机是否动作完成,取得现在位置,目
标位置,微调参数,或是设定的时间与速度値。
12. 分辨率可达2μS。
12. 分辨率可达2μS。
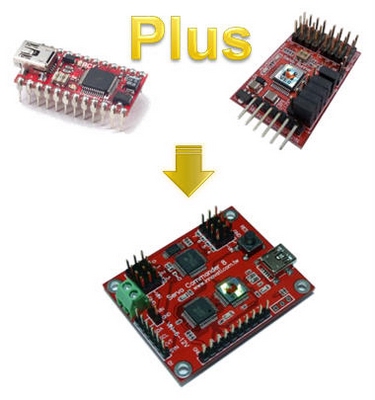
Servo Commander 8深入浅出:
Servo Commander 8结合了单板计算机(BASIC Commander)与伺服机控制模块(Servo Runner 8),拥有两者所有的功能,更有体积及价格优势
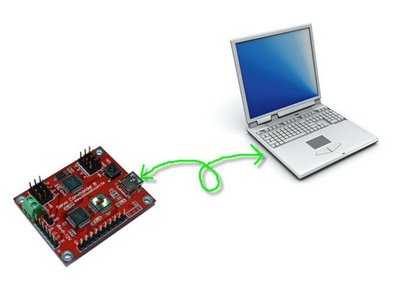
其可透过USB就能从计算机下载文件或是沟通讯息, 而所采用的浅显易懂的InnoBASIC语言更是机器人入门用户最佳学习语言。
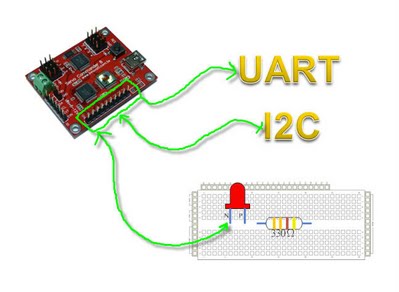
Servo Commander 8提供八个通用脚位(GPIO),其拥有所有Basic Commander系统所有指令功能,让用户可以应付各种外接电路及连接其它应用模块。
可以同时控制最多八组伺服机!
此外,从Servo Commander 8更拥有利基应用科技专属的cmdBUS外围模块接口,超过30种cmdBUS外围模块,让用户可以扩充更多的功能。
相关产品:

{kind=link}